- 更新履歴
- プロフィール
- このサイ
トの説明
- 工作部屋
- 3DCG
- C言語 プログラム
- RPGツ クール
- 自 作MIDI
- 自作
PC
- STAR WARS部屋
- ノベル
- ラ イトセーバー
- 3DCG
日記- BBS
- リンク

Creative Chamber mobile
携帯用の壁紙等を載せています。
お立ち寄りのさいは、
是非ランキングサイト等への投票をお願いします。
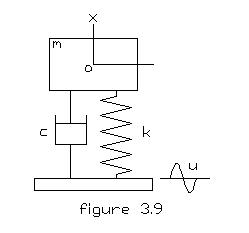
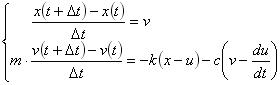
支持台が強制周期変位をして、これにより生ずる質量mの運動をシミュレーションし、アニメーション表示をする。
シミュレーションの方法はオイラー前進解法。(簡単だし)
図3.9に示す支持台に強制変 位が作用する場合を考える。
いま静つり合いにある質量mの重心を原点にとり、図3.9のようにx軸をとる。支持台に作用する上下方向の強制変位をu、これにより生ずるmの変位をx とする。このとき支持台に対するmの相対変位は x-u となり、mに作用するばね力は -k(x-u) 、粘性減衰力は -c(dx/dt - du/dt) である。
したがってmの運動方程式は、
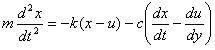 ・・・・・・・・・・(1)
・・・・・・・・・・(1)ここでmの絶対速度をvとおくと、vは、
 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
(2)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
(2)となる。式(2)を式(1)に代入すると、
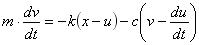 ・・・・・・・・・・・・(3)
・・・・・・・・・・・・(3)となり、式(2)、式(3)より、式(1)は一階連立常微分方程式で表すことができる。
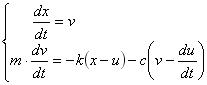 ・・・・・・・・・・・(4)
・・・・・・・・・・・(4)ここで、微分の定義を考えて、式(4)を変形すると、
 ・・(5)
・・(5) ・・・(6)
・・・(6)式(6)の右辺は時刻tの状態、左辺は時刻t+Δtの状態を表している。
いま、支持台の強制周期変位を、
 ・・・・・・・・・・・・・・・・・・・・・・・・
(7)
・・・・・・・・・・・・・・・・・・・・・・・・
(7)の場合について考えると式(6)は、
 ・・・・・・・・・・(8)
・・・・・・・・・・(8)となる。式(8)をもとにプログラムを作成する。
実際にコーディングするまえに、簡単な仕様を考え ておきま す。
- mの座標等の変数はグローバルで宣言する。(ローカルの方がいいんだろうけど、面倒だし…)
- 関数void Init_State(void)をつくり、初期状態を設定する。
- 初期状態は、mが静つり合い状態。
- 関数void Input_Data(void)をつくり、減衰比、p、ωを入力させる。
- 関数void myInit( char *)をつくり、ウインドウやキーボードの設定なんかをやる。(たぶん)
- 関数void Calculate(void)をつくり、式(7),(8)をもとに、m、支持台の座標の計算を行う。
- 関数void draw(void)をつくり、m(Box)、支持台、バネを描く。
- 関数void display(void)をつくり、drawで描いた図をディスプレイに表示させる。
- 関数void move(void)をつくり、時刻tをDELTA_Tだけ進める。
- 関数void myKbd( unsigned char, int, int)をつくり、ESCキーが押されるとプログラムを強制終了、"r"又は"R"が押されると時刻tを0に戻して最初からアニメーションを始める。
- m(Box)が支持台を突き抜けても気にしない。
一応、プログラムがちゃんと動くか確かめます。
方法は、動きがはっきりとする特別な条件を入力して、予想通りの動きをするかを確かめます。これから特別な条件を探していきます。
まず、m(Box)の相対座標xrを考えます。すなわち、
 ・・・・・・・・・・・(9)
・・・・・・・・・・・(9)とおく。これを式(1)に代入、また式(7)も代入し整理すると、
 ・・・・・・・・・・(10)
・・・・・・・・・・(10)式(6)と同様に k/m =p2 、 c/m =2μ とおくと、
 ・・・・・・・・・・・・(11)
・・・・・・・・・・・・(11)となる。
定常強制振動を調べるため、式(11)の特解を求める。(式(11)の一般解は、補関数と特解の和で表さ れるが、補関数の方は自然振動を表しており、時間とともに消滅する。特解は定常強制振動を表す。)ここで、
 ・・・・・・・・・・・・・・・・・・・・・・・・・・
(12)
・・・・・・・・・・・・・・・・・・・・・・・・・・
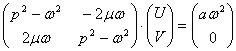
(12)とおく。式(12)を式(11)に代入すると、
 ・・・・・・・・(13)
・・・・・・・・(13)式(13)が時刻tにかかわらず成り立つためには、sinωt、cosωtの係数が0とならなければならない。それぞれの係数=0とおいて式を整理する と、
 ・・・・・・・・・・・・・・(14)
・・・・・・・・・・・・・・(14)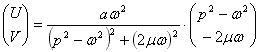 ・・・・・・・・・・・(15)
・・・・・・・・・・・(15)式(15)を式(12)に代入すると、式(11)の特解を求めることができる。ここで、定常強制振動応答(式(12))を、
 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
(16)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
(16)と変形する。振幅Arと位相差βはそれぞれ、
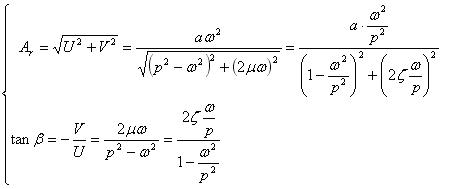 ・・・・・・・・・・(17)
・・・・・・・・・・(17)となる。
ζをパラメータとしてAr/a、ω/pの関係を図示すると、図3.10が得られる。
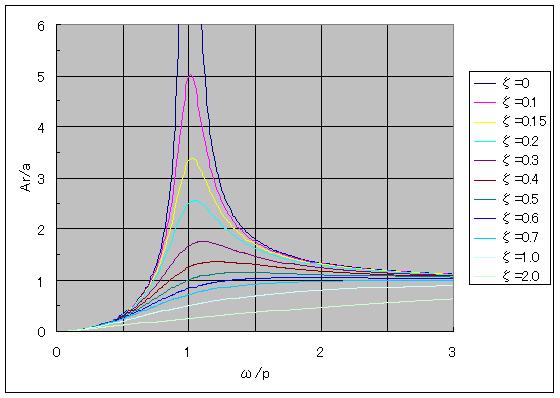
figure 3.10
- 図3.10よりω<<pのときはArはほとんど0すなわちx≒uとなり、mは支持台とほとんど同じ運動をする。
- ζが小のときは、ωがpに近づくにつれてmの振動は増大して極大に達し共振を生ずる。その位置はδAr/δ(ω/p) =0
を満足する、
 ・・・・・・・・・・・・・・(18)
・・・・・・・・・・・・・・(18)
において起こり、そのときの振幅は式(18)を式(17)に代入して、
 ・・・・・・・・(19)
・・・・・・・・(19)
となる。ζが1/√2より大きい場合は極大値は生じない。
- ω>>pにおいてはArはほとんどa、βはほとんど180°となるから、
 ・・・・・・・・・・・・(20)
・・・・・・・・・・・・(20)
すなわちmはほとんど静止の状態にあり、支持台のみがuで動いていることとなる。
参考:斉藤秀雄著『工業基礎振動学』(用賢堂、2004)